|
一、小车器件购买选型
教程里是购买的淘宝上集成好的小车器件。另外自己也买了一些散件配置了一辆自己的小车。 https://detail.tmall.com/item.htm?id=608554421638&spm=a1z09.2.0.0.7e012e8d3NEMy0&_u=12kf16b6b4b 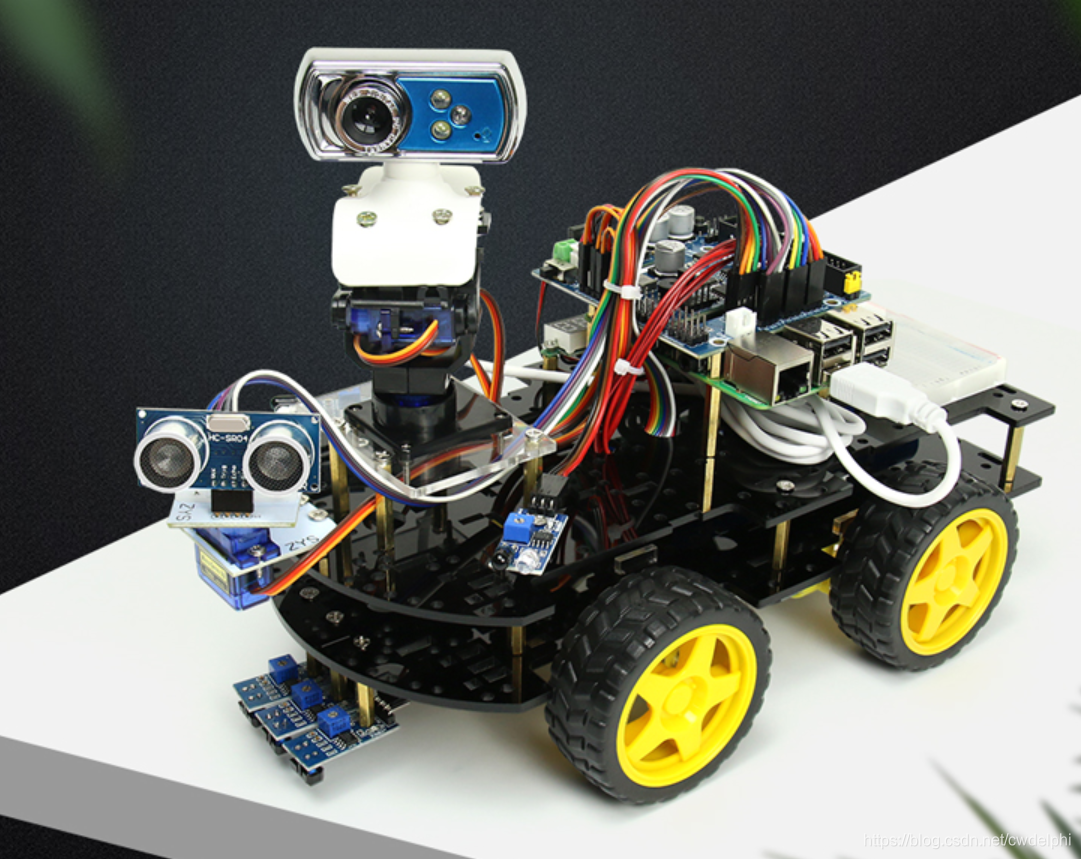
组件包括: 1、小车底板(2个)、电机(4个)、车轮(4个)、杜邦线、铜柱、螺丝若干 2、超声波传感器(1个) + 舵机(1个) 3、循迹传感器(3个) 4、避障传感器(2个,左右) 5、USB摄像头(1个) + 舵机(2个) 6、树莓派4B主控板(2G版本)(1个) 7、树莓派扩展板(1个) 8、电池(1个) 9、电压显示模块(1个)
我最终购买一套花了620元,如果按照散件购买,价格估算如下: 1、小车底板一套:35元 2、超声波+1个舵机+小部件:30元 3、循迹传感器:15元 4、避障传感器:5元 5、USB摄像头+2个舵机:50元 6、树莓派4B(2G版本):320元 7、电池:20元 8、电压显示模块:5元 9、树莓派扩展板:120元 10、16G的SD卡:20元 10、电子教程一套:0元
共计:620元。 也就是说这家店铺等于赚了一个卖散件和自家工厂做的扩展板的利润,没赚取集成费用。对了,手柄是我自己单独购买的,约50元。 建议最经济的做法买套餐B,树莓派不是什么USB摄像头都能兼容的,所以需要买个B套餐摄像头,对于C和D,完全没必要,其它的传感器完全可以以后买。另外如果还想省钱,可以买不带树莓派4B的主控板,买一块树莓派ZeroWH的主控板,可以省200元,用于小车实现性能足够了。
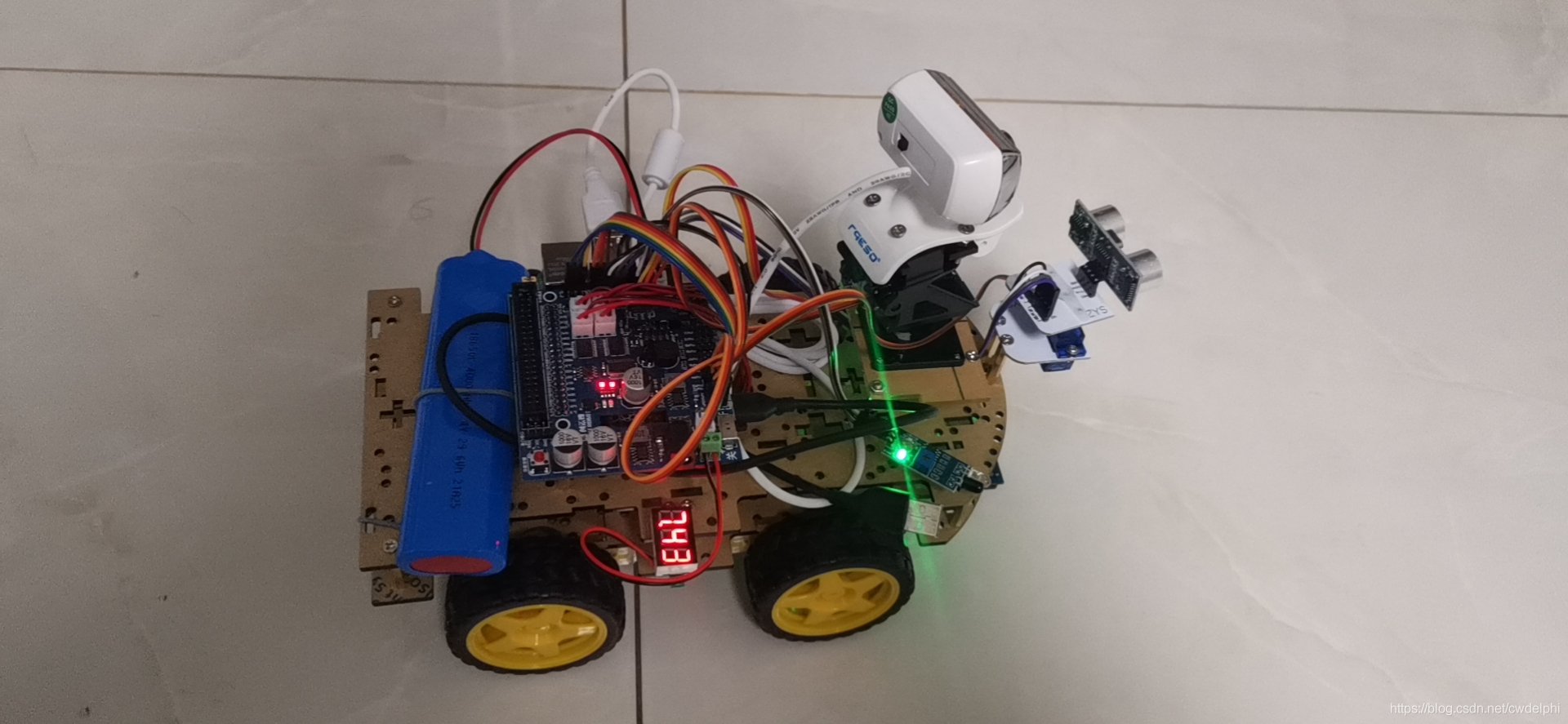
另外我自己还组装了一个全散件的简易小车,呵呵,成本200元,关键这个主控板高级啊,比arduino和esp8266之类的单片机强多了。不要和网上那种100多元的单片机小车比。
1、小车底板(1个)、电机(2个)、车轮(2个)、杜邦线、铜柱、螺丝若干:15元 2、电池+电池盒:10元 3、电源模块:5元 4、电机驱动板:5元 5、树莓派Zero WH:110元(现在涨价了) 6、2.4G无线手柄:35元(可以买便宜点的,我是利旧以前买过的) 7、16G的SD卡:20元。 
二、功能点代码
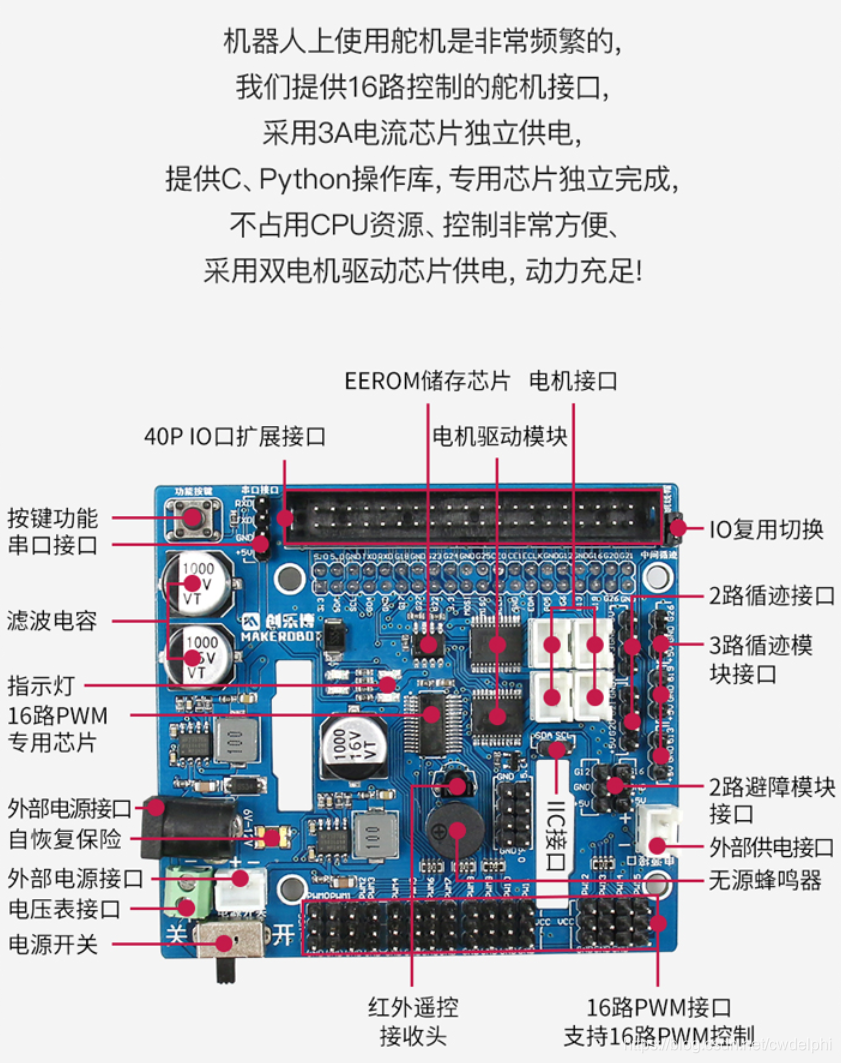
2.1、四轮电机驱动模块(主程序会调用)
2.1.1 原理
树莓派集成扩展板其实内部集成了两块L298N的电机驱动芯片,参考散件其工作原理如下:  简单点就是ENA和ENB是控制车轮速度,IN1、IN2是控制车轮状态(正转、反转、停止)。上图输出A和输出B是分别给车轮电机供电。 简单点就是ENA和ENB是控制车轮速度,IN1、IN2是控制车轮状态(正转、反转、停止)。上图输出A和输出B是分别给车轮电机供电。 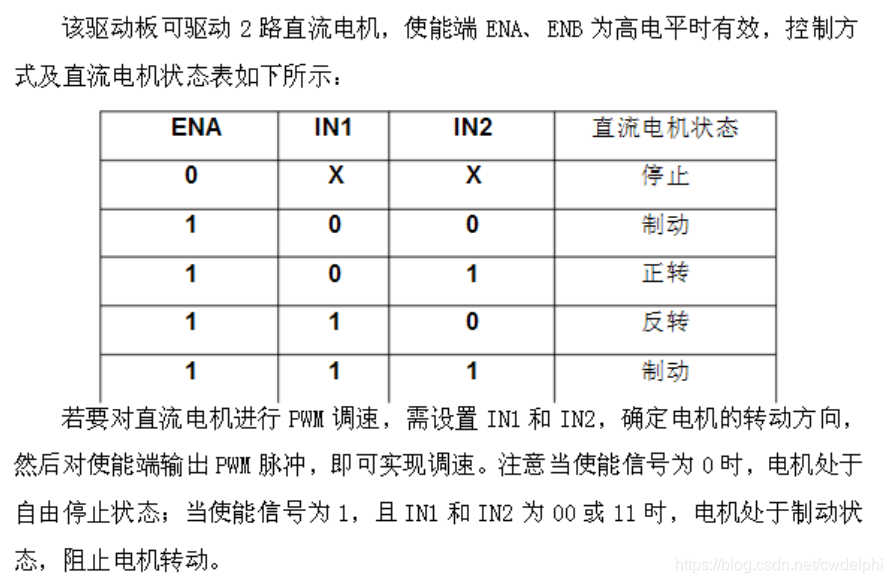
2.1.2 代码
#CarMotor.py
import RPi.GPIO as GPIO
import asyncio
class SingleMotor:
def __init__(self, IN1, IN2, PWM=None):
self.speed = 35
self.freq = 50
self.run_state = "stop"
self.PWM = PWM
self.IN1 = IN1
self.IN2 = IN2
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
self.Motor = None
if self.PWM != None:
GPIO.setup(PWM, GPIO.OUT)
self.Motor = GPIO.PWM(PWM, self.freq)
self.Motor.start(0)
#设置速度(0-100)
def set_speed(self, speed):
if self.Motor == None:
return
if speed > 100:
self.speed = 100
elif speed < 0:
self.speed = 0
else:
self.speed = speed
self.Motor.ChangeDutyCycle(self.speed)
def get_speed(self):
return self.speed
def inc_speed(self, v):
self.set_speed(self.speed + v)
def dec_speed(self, v):
self.set_speed(self.speed - v)
def get_run_state(self):
return self.run_state
#正转
def up(self):
self.run_state = "up"
GPIO.output(self.IN1, GPIO.HIGH)
GPIO.output(self.IN2, GPIO.LOW)
#反转
def down(self):
self.run_state = "down"
GPIO.output(self.IN1, GPIO.LOW)
GPIO.output(self.IN2, GPIO.HIGH)
#停止
def stop(self):
self.run_state = "stop"
GPIO.output(self.IN1, GPIO.LOW)
GPIO.output(self.IN2, GPIO.LOW)
class CarWheel:
def __init__(self, L_Motor, R_Motor):
self.L_Wheel = L_Motor
self.R_Wheel = R_Motor
self.speed = 35
self.set_speed(self.speed)
self.run_state = "stop"
def set_speed(self, speed):
if speed > 100:
self.speed = 100
elif speed < 0:
self.speed = 0
else:
self.speed = speed
self.L_Wheel.set_speed(self.speed)
self.R_Wheel.set_speed(self.speed)
def get_speed(self):
return self.speed
def inc_speed(self, v):
self.L_Wheel.inc_speed(v)
self.R_Wheel.inc_speed(v)
self.speed = self.L_Wheel.get_speed()
def dec_speed(self, v):
self.L_Wheel.dec_speed(v)
self.R_Wheel.dec_speed(v)
self.speed = self.L_Wheel.get_speed()
def get_run_state(self):
return self.run_state
def up(self):
self.run_state = "up"
self.L_Wheel.up()
self.R_Wheel.up()
def stop(self):
self.run_state = "stop"
self.L_Wheel.stop()
self.R_Wheel.stop()
def down(self):
self.run_state = "down"
self.L_Wheel.down()
self.R_Wheel.down()
#小车左转,控制左轮不动,右轮前进即可
def left(self):
self.run_state = "left"
self.L_Wheel.stop()
self.R_Wheel.up()
#小车右转,控制右轮不动,左轮前进即可
def right(self):
self.run_state = "right"
self.L_Wheel.up()
self.R_Wheel.stop()
async def motor_task():
L_Motor = SingleMotor(
PWM = 18,
IN1 = 22,
IN2 = 27
)
R_Motor = SingleMotor(
PWM = 23,
IN1 = 25,
IN2 = 24
)
cm = CarWheel(
L_Motor = L_Motor,
R_Motor = R_Motor
)
t_time = 2
cm.inc_speed(5)
cm.up()
await asyncio.sleep(t_time)
cm.dec_speed(5)
cm.down()
await asyncio.sleep(t_time)
cm.left()
await asyncio.sleep(t_time)
cm.right()
await asyncio.sleep(t_time)
cm.stop()
await asyncio.sleep(t_time)
async def main():
dltasks = set()
dltasks.add(asyncio.ensure_future(motor_task()))
dones, dltasks = await asyncio.wait(dltasks)
for task in dones:
print("Task ret: ", task.result())
if __name__ == '__main__':
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
loop = asyncio.get_event_loop()
loop.run_until_complete(main())
try:
loop.run_forever()
except KeyboardInterrupt:
pass
finally:
GPIO.cleanup()
2.2、超声波例子
#https://gpiozero.readthedocs.io/en/stable/recipes.html#distance-sensor
#DistanceSensor_t.py
from gpiozero import DistanceSensor
from time import sleep
sensor = DistanceSensor(21, 20)
while True:
print('Distance to nearest object is', sensor.distance, 'm')
sleep(1)
2.3、2.4G无线手柄控制例子
#joystick_t.py
import asyncio
import pygame
from pygame.locals import *
async def joystick_task(self):
#JOYAXISMOTION joy, axis, value
#JOYBALLMOTION joy, ball, rel
#JOYHATMOTION joy, hat, value
#JOYBUTTONUP joy, button
#JOYBUTTONDOWN joy, button
while True:
for event in pygame.event.get():
# if event.type == pygame.JOYAXISMOTION:
# print("Joystick JOYAXISMOTION.")
# if event.type == pygame.JOYBALLMOTION:
# print("Joystick JOYBALLMOTION.")
if event.type == pygame.JOYHATMOTION:
# print("Joystick JOYHATMOTION.")
if event.value == (-1, 0):
print('left')
elif event.value == (0, 1):
print('up')
elif event.value == (0, -1):
print('down')
elif event.value == (1, 0):
print('right')
elif event.value == (0, 0):
print('stop')
else:
print(event.value)
elif event.type == pygame.JOYBUTTONDOWN:
print("Joystick JOYBUTTONDOWN.")
if joystick.get_button(0) == 1:
print('button[Y]')
elif joystick.get_button(1) == 1:
print('button[B]')
elif joystick.get_button(2) == 1:
print('button[A]')
elif joystick.get_button(3) == 1:
print('button[X]')
else:
pass
elif event.type == pygame.JOYBUTTONUP:
print("Joystick JOYBUTTONUP.")
else:
pass
await asyncio.sleep(0.1)
async def main():
pygame.init()
pygame.joystick.init()
# Get count of joysticks
joystick_count = pygame.joystick.get_count()
print("Number of joysticks: {0}".format(joystick_count))
joystick0 = pygame.joystick.Joystick(0)
joystick.init()
dltasks = set()
dltasks.add(asyncio.ensure_future(joystick_task()))
dones, dltasks = await asyncio.wait(dltasks)
for task in dones:
print("Task ret: ", task.result())
if __name__ == '__main__':
loop = asyncio.get_event_loop()
loop.run_until_complete(main())
try:
loop.run_forever()
except KeyboardInterrupt:
pass
finally:
pygame.quit()
2.4、网络服务
#见主程序
2.5、舵机模块(主程序会调用)
#CarServo.py
import Adafruit_PCA9685
import RPi.GPIO as GPIO
import time
class CarServo:
def __init__(self):
#2个摄像头舵机,1个超声波舵机
self.pwm_pca9685 = Adafruit_PCA9685.PCA9685()
self.pwm_pca9685.set_pwm_freq(50)
self.servo = {}
self.set_servo_angle(0, 110)
self.set_servo_angle(1, 100)
self.set_servo_angle(2, 20)
#输入角度转换成12^精度的数值
def set_servo_angle(self, channel, angle):
if (channel >= 0) and (channel 180:
new_angle = 180
else:
new_angle = angle
print("channel={0}, angle={1}".format(channel, new_angle))
#date=4096*((new_angle*11)+500)/20000#进行四舍五入运算 date=int(4096*((angle*11)+500)/(20000)+0.5)
date = int(4096*((new_angle*11)+500)/(20000)+0.5)
self.pwm_pca9685.set_pwm(channel, 0, date)
self.servo[channel] = new_angle
else:
print("set_servo_angle error. servo[{0}] = [{1}]".format(channel, angle))
def inc_servo_angle(self, channel, v):
self.set_servo_angle(channel, self.servo[channel] + v)
def dec_servo_angle(self, channel, v):
self.set_servo_angle(channel, self.servo[channel] - v)
if __name__ == '__main__':
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
cs = CarServo()
cs.inc_servo_angle(0, 10)
cs.inc_servo_angle(1, 10)
cs.inc_servo_angle(2, 10)
time.sleep(2)
cs.dec_servo_angle(0, 10)
cs.dec_servo_angle(1, 10)
cs.dec_servo_angle(2, 10)
time.sleep(2)
GPIO.cleanup()
2.6、USB摄像头例子
#见主程序
2.7、红外避障例子
import RPi.GPIO as GPIO
import time
pin_avoid_obstacle=18
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin_avoid_obstacle, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
try:
while True:
status = GPIO.input(pin_avoid_obstacle)
if status == TRUE:
print('我是红外避障模组,没有检测到障碍物,一切正常!')
else:
print('我是红外避障模组,检测到障碍物,注意停车')
time.sleep(0.5)
except KeyboradInterrupt:
pass
finally:
GPIO.cleanup()
2.8、循迹模块例子
#家里地下暂时不想贴黑线,所有没写这块代码
三、小车完整代码
#ppycar.py
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import asyncio
import aiohttp
import websockets
import json
import time
import logging
import threading
import sys
import cv2
from aiohttp import web
from concurrent.futures import ThreadPoolExecutor
import RPi.GPIO as GPIO
import pygame
from pygame.locals import *
from CarMotor import CarWheel, SingleMotor
from gpiozero import DistanceSensor
#from CarDistance import CarDistance
from CarServo import CarServo
class CwCar:
def __init__(self):
#左边前轮和后轮(电路确保行动一致)
L_Motor = SingleMotor(
PWM = 18,
IN1 = 22,
IN2 = 27
)
#右边前轮和后轮(电路确保行动一致)
R_Motor = SingleMotor(
PWM = 23,
IN1 = 25,
IN2 = 24
)
#小车
self.cm = CarWheel(
L_Motor = L_Motor,
R_Motor = R_Motor
)
#超声波测距
self.sensor = DistanceSensor(21, 20)
#2个摄像头舵机,1个超声波舵机
self.cs = CarServo()
#线程池,用于封装非协程对象
self.__executor = ThreadPoolExecutor(10)
self.__loop = asyncio.get_event_loop()
self.cap = cv2.VideoCapture(0)
self.jpg_bytes = None
#非协程对象的阻塞函数调用封装
async def ThreadRun(self, func, *args,**kwargs):
return await self.__loop.run_in_executor(self.__executor, func, *args,**kwargs)
#定期更新超声波所测的障碍物距离
async def distance_task(self, update_time):
print("distance_task start")
while True:
dist_float = self.sensor.distance
dist = int(dist_float * 100)
#当距离不到40cm的时候且运行状态为前进,则小车停止运行
if (dist < 80) and (self.cm.get_run_state() == 'up'):
self.cm.stop()
await asyncio.sleep(update_time)
print("distance_task end")
#手柄指令控制小车运行
async def joystick_task(self):
joystick = pygame.joystick.Joystick(0)
joystick.init()
while True:
for event in pygame.event.get():
#手柄左边的上下左右键,控制小车运行
if event.type == pygame.JOYHATMOTION:
if event.value == (-1, 0):
print('left')
self.cm.left()
elif event.value == (0, 1):
print('up')
dist_float = self.sensor.distance
dist = int(dist_float * 100)
if dist > 80:
self.cm.up()
elif event.value == (0, -1):
print('down')
self.cm.down()
elif event.value == (1, 0):
print('right')
self.cm.right()
elif event.value == (0, 0):
print('stop')
self.cm.stop()
else:
print(event.value)
#控制小车速度
elif event.type == pygame.JOYBUTTONDOWN:
print("Joystick JOYBUTTONDOWN.")
if joystick.get_button(0) == 1:
print('button[Y]')
elif joystick.get_button(1) == 1:
print('button[B]')
self.cm.inc_speed(5)
elif joystick.get_button(2) == 1:
print('button[A]')
elif joystick.get_button(3) == 1:
print('button[X]')
self.cm.dec_speed(5)
#控制摄像头舵机
elif joystick.get_button(4) == 1:
print('button[4]')
self.cs.inc_servo_angle(1, 5)
elif joystick.get_button(5) == 1:
print('button[5]')
self.cs.dec_servo_angle(1, 5)
elif joystick.get_button(6) == 1:
print('button[6]')
self.cs.inc_servo_angle(2, 5)
elif joystick.get_button(7) == 1:
print('button[7]')
self.cs.dec_servo_angle(2, 5)
else:
pass
await asyncio.sleep(0.1)
#接收远程网页上发送的小车控制指令
async def car_recv_msg(self, ws, msg):
response_ojb = {
"cmd" : "None",
"ret" : 0,
"errinfo": ""
}
try:
recv_text = msg.data
recv_json_obj = json.loads(recv_text)
print(recv_json_obj)
cmd = recv_json_obj['cmd']
response_ojb['cmd'] = cmd
print("cmd = {0}".format(cmd))
if cmd == "stop":
self.cm.stop()
elif cmd == "up":
dist = int(await self.ThreadRun(self.cd.distance))
if dist > 80:
self.cm.up()
elif cmd == "down":
self.cm.down()
elif cmd == "left":
self.cm.left()
elif cmd == "right":
self.cm.right()
elif cmd == "inc":
self.cm.inc_speed(5)
speed = self.cm.get_speed()
response_ojb["speed"] = speed
elif cmd == "dec":
self.cm.dec_speed(5)
speed = self.cm.get_speed()
response_ojb["speed"] = speed
else:
print("cmd error")
except Exception as e:
print("recv json error:{0}:{1}:{2}" .format(
e.__traceback__.tb_frame.f_globals["__file__"],
e.__traceback__.tb_lineno,
e))
response_ojb["ret"] = 1
response_ojb["errorinfo"] = "recv json error"
response_json = json.dumps(response_ojb)
await ws.send_str(response_json)
#websocket接收消息协议解析
async def websocket_car_handler(self, request):
print('websocket_car_handler start...')
ws = web.WebSocketResponse()
await ws.prepare(request)
while not ws.closed:
msg = await ws.receive()
if msg.type == aiohttp.WSMsgType.text:
await self.car_recv_msg(ws, msg)
elif msg.type == aiohttp.WSMsgType.close:
print('websocket connection closed')
elif msg.type == aiohttp.WSMsgType.error:
print('ws connection closed with exception {0}'.format(ws.exception()))
else:
await ws.send_str('websocket_car_handler')
return ws
#返回摄像头图像数据给请求网页
async def websocket_webcam_handler(self, request):
print('websocket_webcam_handler start...')
ws = web.WebSocketResponse()
await ws.prepare(request)
while not ws.closed:
msg = await ws.receive()
if msg.type == aiohttp.WSMsgType.text:
print(msg.data, end='')
if self.jpg_bytes != None:
await ws.send_bytes(self.jpg_bytes)
elif msg.type == aiohttp.WSMsgType.close:
print('websocket connection closed')
elif msg.type == aiohttp.WSMsgType.error:
print('ws connection closed with exception {0}'.format(ws.exception()))
else:
await ws.send_str('websocket_webcam_handler')
return ws
#定时采集摄像头图像数据
async def webcam_read_task(self):
print("{0}:{1}".format("webcam_read_task", "start"))
encode_param = [int(cv2.IMWRITE_JPEG_QUALITY), 50]
while True:
await self.ThreadRun(self.__webcam_read, encode_param)
await asyncio.sleep(0.05)
print("{0}:{1}".format("webcam_read_task", "end"))
#摄像头图像数据采集
def __webcam_read(self, encode_param):
ret, frame = self.cap.read()
ret, jpg = cv2.imencode('.jpg', frame, encode_param)
self.jpg_bytes = jpg.tobytes()
async def main(main_loop):
cc = CwCar()
local_ip = '0.0.0.0'
local_port = 5678
app = web.Application()
app.router.add_route('GET', '/ppycar', cc.websocket_car_handler)
app.router.add_route('GET', '/sendframe', cc.websocket_webcam_handler)
app.router.add_static('/static', path='webroot', show_index=True)
runner = web.AppRunner(app)
await runner.setup()
site = web.TCPSite(runner, local_ip, local_port)
print("MainLoop:Server started at http://{0}...:{1}".format(local_ip, local_port))
dltasks = set()
dltasks.add(asyncio.ensure_future(cc.joystick_task())) #手柄控制
dltasks.add(asyncio.ensure_future(site.start())) #websockets网页控制
dltasks.add(asyncio.ensure_future(cc.webcam_read_task())) #定时摄像头图像数据采集
dltasks.add(asyncio.ensure_future(cc.distance_task(update_time = 0.05)))#定时超声波测距
dones, dltasks = await asyncio.wait(dltasks)
for task in dones:
print("Main Task ret: ", task.result())
if __name__ == '__main__':
pygame.init()
pygame.joystick.init()
joystick_count = pygame.joystick.get_count()
print("Number of joysticks: {0}".format(joystick_count))
#确保有且只有一个手柄控制
if joystick_count != 1:
print("joystick_count < 1, sys.exit.")
GPIO.cleanup()
pygame.quit()
sys.exit()
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
main_loop = asyncio.get_event_loop()
main_loop.run_until_complete(main(main_loop))
try:
main_loop.run_forever()
except KeyboardInterrupt:
pass
finally:
GPIO.cleanup()
pygame.quit()
四、网页控制完整代码
ppy_car_web.html
小车远程控制
let ws;
let wsurl = "ws://" + window.location.hostname + ":5678/ppycar"
//let wsurl = "ws://192.168.3.128:5678/ppycar"
let speed = 35;
function car_cmd(car_cmd_json){
let jsonText = JSON.stringify(car_cmd_json);
console.log(jsonText);
if (ws.readyState == 1){
ws.send(jsonText);
}else{
console.log("ws.readyState = " + ws.readyState)
}
}
function car_speed(cmd){
car_cmd({cmd: cmd})
}
function car_move(cmd){
car_cmd({cmd: cmd})
}
function car_distance(){
car_cmd({cmd: 'distance'})
}
function ws_conn(){
ws = new WebSocket(wsurl);
console.log("ws_conn.");
ws.onopen = function()
{
console.log("do_ws_open.");
};
ws.onmessage = function (evt)
{
let received_msg = evt.data;
console.log("recv info:" + received_msg);
let obj = JSON.parse(received_msg)
if((obj.cmd == 'inc') || (obj.cmd == 'dec')){
document.getElementById("car_speed").innerHTML = obj.speed + "(区间:0-100)";
}
};
ws.onclose = function()
{
console.log("ws close.");
};
}
function ws_close(){
console.log("do_ws_close.");
ws.close();
}
let webcam_wsurl = "ws://" + window.location.hostname + ":5678/sendframe"
let socket = new WebSocket(webcam_wsurl);
let img = new Image();
function sendMsg() {
socket.send("update");
console.log("socket: send update");
}
function Uint8ToString(u8a) {
var CHUNK_SZ = 0x8000;
var c = [];
for (var i = 0; i < u8a.length; i += CHUNK_SZ) {
c.push(String.fromCharCode(...u8a.subarray(i, i + CHUNK_SZ)));
}
return c.join("");
}
function drawFrame(frame) {
var uint8Arr = new Uint8Array(frame);
var str = Uint8ToString(uint8Arr);
var base64String = btoa(str);
img.onload = function () {
context.drawImage(this, 0, 0, canvas.width, canvas.height);
};
img.src = "data:image/png;base64," + base64String;
}
socket.onopen = () => {
console.log("socket: connected");
};
socket.onmessage = (msg) => {
msg.data.arrayBuffer().then((buffer) => {
drawFrame(buffer);
console.log("socket: frame updated");
});
};
小车远程控制
前进
左转
后退
右转
减速
加速
停止
小车数据采集
小车速度
35(0-100)
超声波距离
0(毫米)
小车摄像头
const canvas = document.getElementById("canvas-video");
const context = canvas.getContext("2d");
// show loading notice
context.fillStyle = "#333";
context.fillText("Loading...", canvas.width / 2 - 30, canvas.height / 3);
setInterval(() => {
socket.send("x");
}, 100);
|